
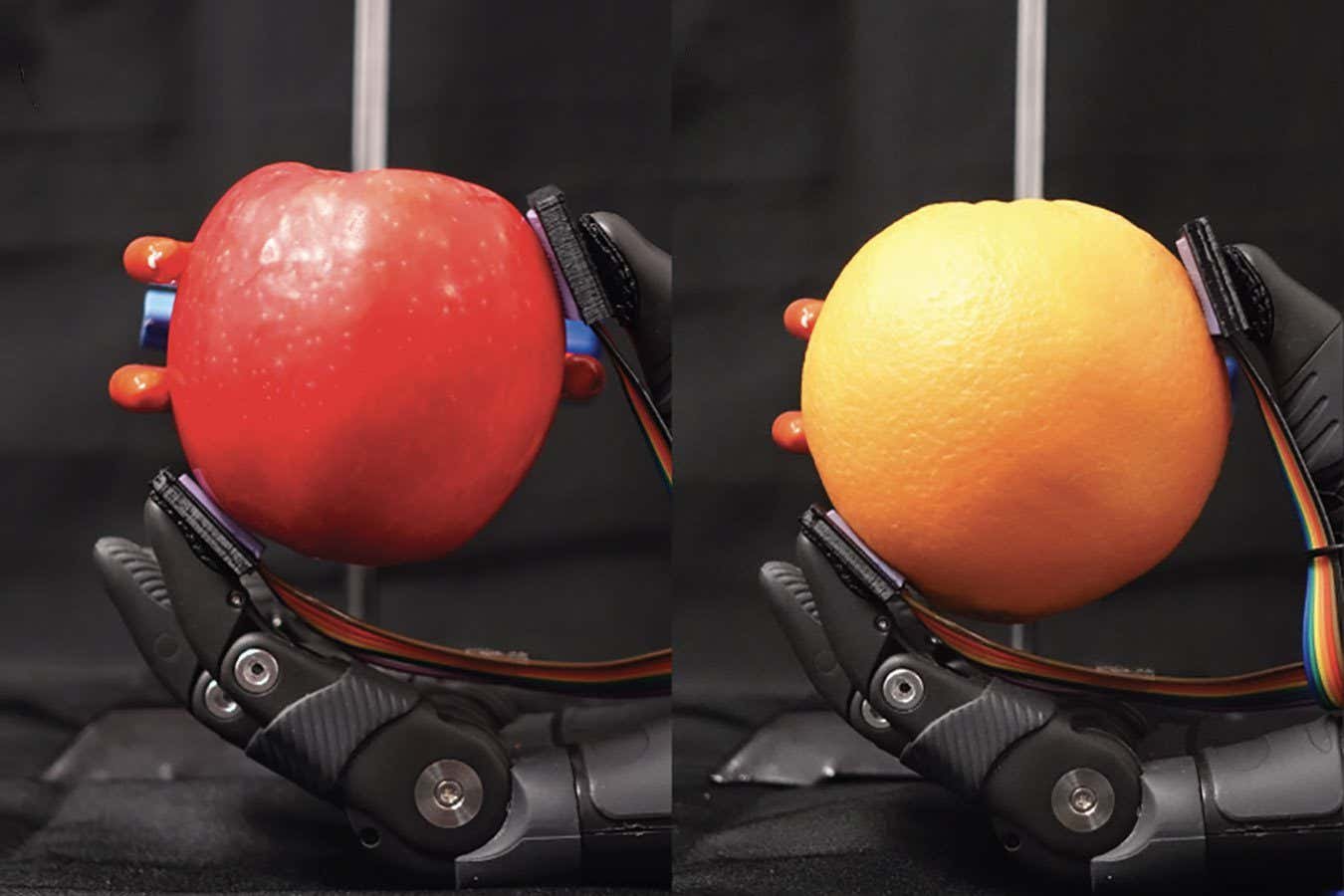

A robotic hand with vibration sensors in the fingertips can grasp apples and oranges with just the right amount of force
Anway S. Pimpalkar et al. (2024)/CC BY 4.0
A robotic hand inspired by human skin can sense how hard an object is with a single digit’s touch and work out how much force is needed to grip it before the rest of the hand closes its grasp.
Gripping an object firmly enough to secure it, but softly enough that it doesn’t break, is something that humans learn as infants, but robots still struggle with.

Felecia Phillips Ollie DD (h.c.) is the inspiring leader and founder of The Equality Network LLC (TEN). With a background in coaching, travel, and a career in news, Felecia brings a unique perspective to promoting diversity and inclusion. Holding a Bachelor’s Degree in English/Communications, she is passionate about creating a more inclusive future. From graduating from Mississippi Valley State University to leading initiatives like the Washington State Department of Ecology’s Equal Employment Opportunity Program, Felecia is dedicated to making a positive impact. Join her journey on our blog as she shares insights and leads the charge for equity through The Equality Network.


